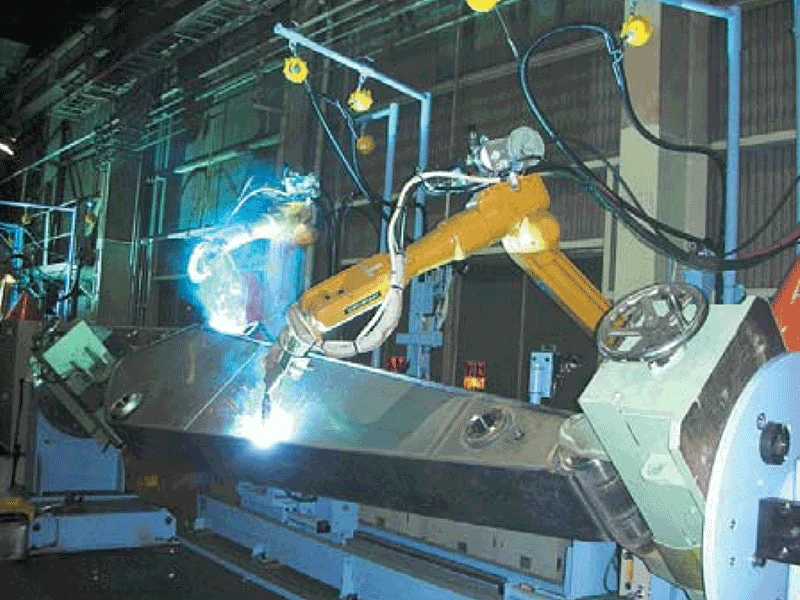
建機部品溶接ロボットシステム
建設機械部材溶接に精通した高品質、高溶着施工による最適システム提案
日本で、世界でインフラを創出する建設機械。神戸製鋼は高品質化と効率化に貢献する、溶接プロセス、システム、材料を提供していきます。

アーム溶接システム
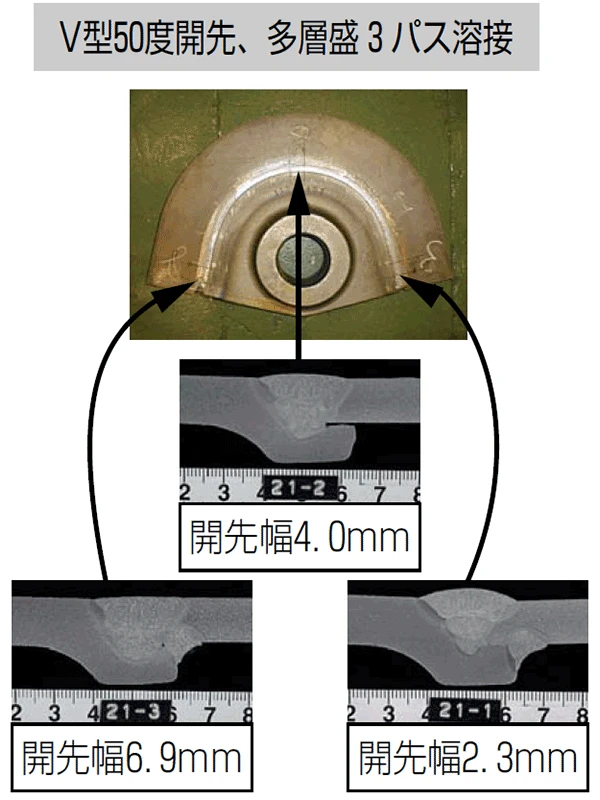
「開先幅倣い機能」で開先幅の変動にリアルタイムで追従し溶接条件を補正します。
さらに、センシングポイント数を削減し、タクトタイムを短縮します。
| ロボット | ARCMAN™(中型機)2式 |
|---|---|
| 移動装置 | 1軸(左右)2式 |
| ポジショナ | 両持ち1軸(回転)2,000kg |
| 備考 | 開先幅倣い機能 |
ブーム溶接システム

傾斜した長い溶接線に最適姿勢を取ると共に、タンデム溶接で高能率を実現します。
天吊式と周辺装置の採用で省スペースを実現します。
| ロボット | ARCMAN™(小型機)天吊1式 |
|---|---|
| 移動装置 | 一体型2軸(左右、前後) |
| ポジショナ | 片両持ち3軸(回転、傾斜、上下)4,000kg |
| 備考 | タンデム溶接(一体型トーチ) |
ブームドッキング溶接システム

ブームのドッキング溶接を大電流MAGプロセスを活用し、大幅にタクトタイム短縮を図っています。
専用溶接ワイヤFAMILIARC™ MX-A100D(1.4mmΦ)と高性能デジタル制御溶接機 SENSARC™ RA500(2基を並列接続)の採用で、高電流・深溶込みを特長とする大電流MAGプロセスを実現しています。
| ロボット | ARCMAN™(中型機) |
|---|---|
| 移動装置 | 1軸(前後) |
| ポジショナ | 両持ち1軸(回転)12,000kg |
| 備考 | 大電流MAGプロセス |
スイングフレーム溶接システム

4台のロボットの同時施工で溶接時間を大幅に短縮します。
矢尻ウィービングは立向溶接を可能にし、ポジショナとクランプを不要にしました。
レーザセンサによりルートギャップを検知し高品質な溶接を実現します。
| ロボット | ARCMAN™(中型機)天吊4式 |
|---|---|
| 移動装置 | 2軸(左右、前後)4式 |
| 備考 | 矢尻ウィービング、レーザーセンサ |
バケット溶接システム

天吊ロボットと一体型周辺装置により、省スペースと高適用率を実現します。ポジショナ昇降軸はワークのセット負荷を低減します。
| ロボット | ARCMAN™(小型機)天吊1式 |
|---|---|
| 移動装置 | 一体型2軸(左右、前後) |
| ポジショナ | 片持ち3軸(回転、傾斜、上 下)2,000㎏ |
ベースフレーム溶接システム

シングル/タンデムトーチの持換えを自動化し、タクトタイムを阻害せず、高い稼働率を実現します。
ワークを搬入出する自動システムを実現し、生産性向上に寄与します。
| ロボット | ARCMAN™(大型機)2式 |
|---|---|
| ポジショナ | 片持ち5軸(走行、旋回、昇降、傾斜、回転)2,000kg |
| 備考 | 自動搬送装置、タンデム/シングル持替 |
丸胴(旋回軸)システム

タンデム溶接でサイクルタイムを40%削減しました。(シングル溶接比)
先行/後行極の条件管理が簡便で最適条件を作成し、滑らかで溶込みの良い溶接を実現します。
ARCMAN™ XLは、移動装置を省いたシンプルなシステムを実現します。
| ロボット | ARCMAN™(大型機)1式 |
|---|---|
| ポジショナ | 片持ち2軸(回転、傾斜)2,000kg |
| 備考 | タンデム溶接(2トーチ式) |
YouTube Kobelco公式チャンネル 溶接製品紹介
建設機械向け各種溶接システムや予熱機能付き溶接ロボットシステムをご紹介
ARCMAN™溶接システムカタログ

建機自動溶接用ソリッドワイヤ

お問い合わせ
フォームでのお問い合わせを受け付けております。まずはお気軽にご相談ください。